骨がどう形作られるかを、数理モデルと観察の両面から解き明かす―生命生物科学科 坂下美咲嘱託特別講師に聞く―
魚の骨は力に応じて形成されるのか――。坂下美咲嘱託特別講師は、工学理論を応用したシミュレーションと細胞レベルの観察を通して、魚の椎骨がウォルフの法則に基づいて形成される仕組みを解明しています。さらに、その研究を生物進化や古生物の運動様式の理解へとつなげようとしています。
機械やシステムを思うように動かすための制御工学において、中村教授は「人間がいかなるミスをしようとも安全性が保証される仕組み」を、世界で初めて考案しました。

機械やシステムを思うように動かすための「制御工学」は、もとは18世紀に、蒸気機関の安全性を保証する仕組みを作るために誕生しました。しかし、機械やシステムの安全性を保証する仕組みを作ることは難しく、それは長い間実現されないままでした。ようやく実現したのは2014年になってのことでした。その後、安全性に関する制御工学の研究が進む中で、中村教授は、人間がいかなるミスをしようとも安全性が保証される仕組みを、世界で初めて考案しました。制御工学とは何か、安全性とはどう生み出されるのか。中村教授に聞きました。
中村 文一(なかむら ひさかず) 2000年 東京工業大学理工学研究科制御工学専攻 修士課程修了、2003年 奈良先端科学技術大学院大学情報科学研究科情報システム学専攻 博士課程 修了。博士(工学)。その後、奈良先端科学技術大学院大学 情報科学研究科 助教、ベルギー・ゲント大学 システムズ研究グループ 客員研究員、東京理科大学理工学部電気電子情報工学科講師,同准教授を経て、2020年、同教授。2023年、学部の名称変更により現職へ。
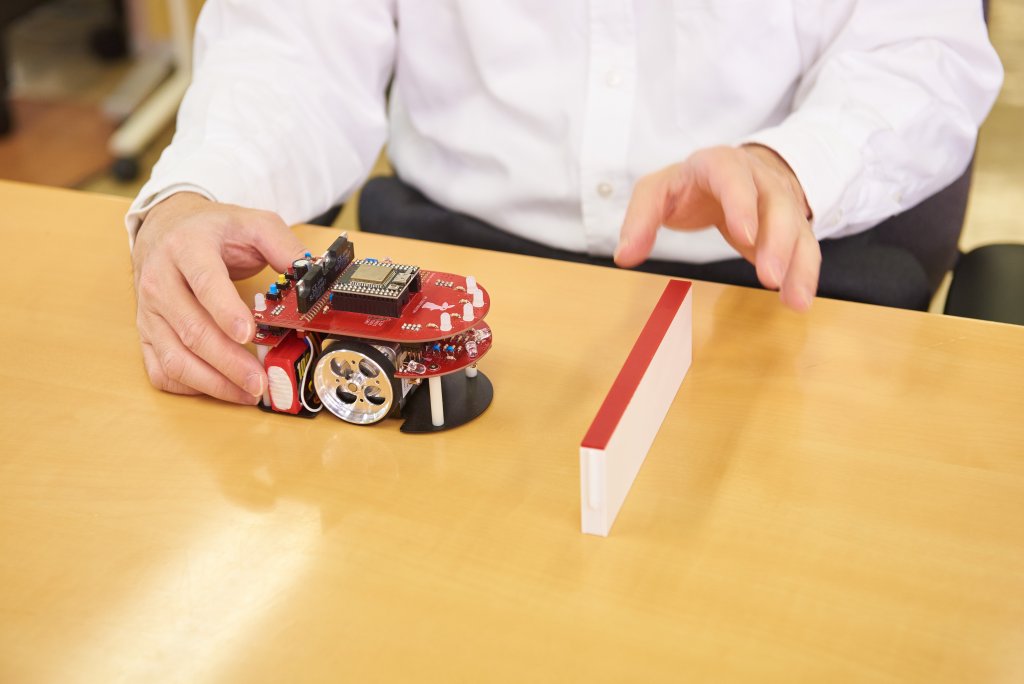
私たちは普段、自動車やコンピュータ、ロボットなど、様々な機械やシステムに囲まれて生活しています。それらが我々の望む通りに動くようにするにはどうすればいいかを考える分野を制御工学と言い、それが私の専門です。こんな動きをする機械を作るにはどうすればいいか。その方法を考え、そのための理論、または理論に基づく仕組み(フレームワーク)を構築し、実際に機械を作り、その動きを検証する。そんな研究を行っています。
特に私は、「非線形」と呼ばれる複雑な動きをする機械やシステムに関する制御を主に研究しています。中でも近年注力してきたのが、それらの安全性を保証する仕組みを作る研究です。すなわち、人間がどのような入力を加えても絶対に事故が起こらないようなシステムを作るにはどうすればいいか、ということに主眼をおいた研究を進めてきました。
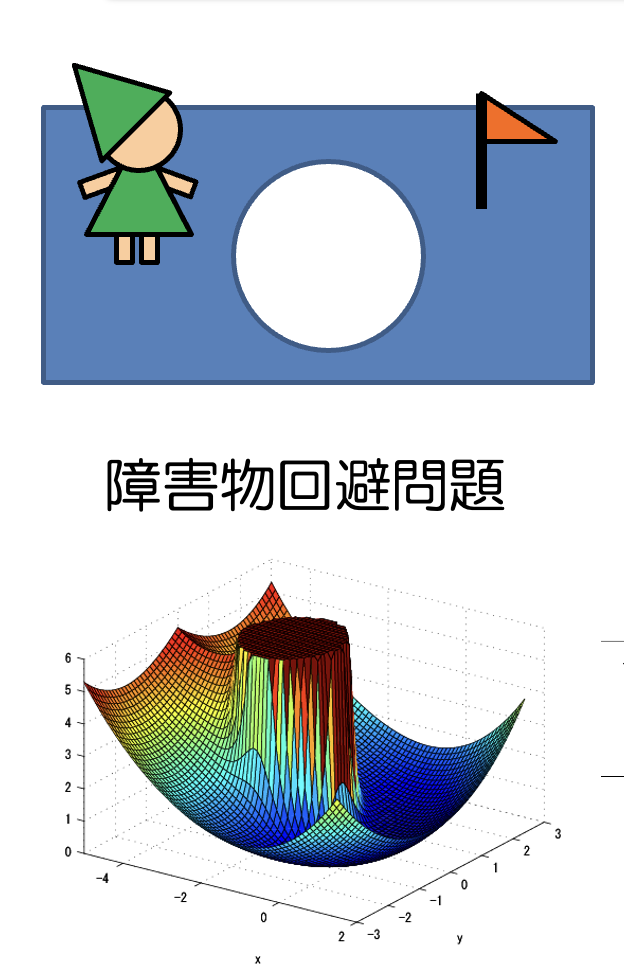
機械やロボットを制御するのに最も重要なのは数学です。たとえば、「ある目標点に向かって障害物をよけながら自律的に移動するロボットを作りたい」とすると、そのような動作を実現する仕組みを、数学の関数で表現しなければなりません。そのイメージを具体的に言うと、まず、ロボットの位置をxとした時に、その位置におけるロボットのエネルギーを表すV(x)という関数を考えます(これを「ポテンシャル関数」などと言います)。そしてV(x)を、ざっくりと言えば次のような条件を満たすように設計します。
・目標点xgoalではV(x=xgoal)=0
・それ以外の点ではV(x)>0
・V(x)は常に減少する(=V(x)の一階微分が常に負)
ロボットの動きを、このようなV(x)に従うようにすれば、自然と目標点へ向かっていくことになります(=V(x)は常に減少するため、ロボットはV(x)が最小となる目標点に向かう)。加えて、障害物があるところでは、無限大に発散するようにV(x)を設計しておけば、障害物をよけることになるわけです(=V(x)は常に減少するため、V(x)が大きくなるところにはロボットは行かない)。実際はもっと複雑ですが、このような流れで関数V(x)が設計され、それが出来上がると、ロボットがどう動くかが決まります。
それはセンサなどを使って実現します。センサを使えば、たとえばロボットと障害物との距離を測ることができます。その距離が小さくなったらV(x)の値が大きくなるようにV(x)を設計する。そしてその出力を電流の流れなどに変え、ロボットの動きへと変換するのです。そうすればロボットは障害物を避けるように動くという具合です。
ロボットに限らず、自動車でもその他の機械でも、制御における基本的な考え方は同じです。私たちの研究室では、このような数学面の設計から、実際に機械を作り、検証するところまですべての工程を行っています。

制御工学はもともと、18世紀にジェームス・ワットの蒸気機関ができたころに、その安全性を保証する仕組みを作るために生まれた学問でした。ところが目的にかなう研究は長らく進まず、安全性を直接的に保証する数学的なフレームワークができたのは、なんと2014年のことでした。そして2019年には、人間がどのような入力をしても絶対に事故は起こらないというフレームワークを、私たちが、世界で初めて作ることに成功しました。
もちろん、絶対に事故は起こらないと言っても、センサが壊れていたりすればまた別の話になります。しかし、そうした問題がない場合に、数学的には絶対に大丈夫というフレームワークが作り出せたことは、大きな意義のあることだと考えています。

たとえば「障害物に衝突しない」ようにするためには、先のような関数において「値が増えない」という条件を入れておけば、衝突はしません。ただ、私たちのフレームワークでは、これぐらいだったら増えても良いと、値が増えることを許容しています。つまり、ちょっとずつであれば障害物に近付いていける。でも衝突はしない。というのを実現しているのが新しい点だと言えます。
また、安全性を保証する数学的フレームワークがあることの意味について、もう一点補足すると、機械を作るコストを削減できるということがあります。つまり、そのようなフレームワークがなくとも、たとえば、自動車ブレーキの補助システムのようなものは作れるのですが、その際には実験を繰り返す必要があるため、開発コストが高くなります。一方、数学的なフレームワークがあると、実験を最小限にできるため、コストが抑えられるのです。低いコストで安全性を高められることは重要です。その点でも、安全性を保証するフレームワークがある意味は大きいと言えます。

そうですね。高齢者の自動車事故などがよく話題になりますし、安価で安全なシステムを作ることに貢献できるのは嬉しいことです。現在は自動車メーカーや船舶の会社などとも共同研究を進めています。

“創域”は、「領域を創る」という意味として理解していますが、自分の研究では、安全性の保証という分野で確かに新しい領域を創ることができたように思っています。これまで、安全性は、人間が介在しないようなシステムでないと保証できないと言われていました。そうした中で、人間を含めたあらゆるファクターに対して安全性を保証するフレームワークを構築することができました。それは私にとっての“創域”のように感じています。一方、他の分野の研究者とコラボして新しい領域を創出するということはほとんどできていないのですが、自分たちが作った安全保証の仕組みが、他の様々な分野の方に使ってもらえるようになった際には、積極的に協力して、一緒に新しいものを生み出すことに貢献できたらと思っています。

また、研究室の学生たちには、大学や大学院を出たあとただ就職するというだけでなく、たとえばベンチャーを起こすなどして、進路も自分自身で創っていくことを意識してほしいと話しています。そういうことも、広く言えば、“創域”という言葉につながってくるのではないかなと考えて、いま教育を行っています。

比較的多いのではないかなと思います。ただ学生には、私が安全性の問題に取り組んでいることは気にせず、自分の興味ある研究テーマを好きに選んでほしいと伝えています。そのため、ARやVR、ネットワークでの遠隔操作など、いろんな技術を使って、各自好きなロボットやシステムを作っています。やはり学生たちは、自分とはまた違った感性を持っているし感覚も鋭い。そこをうまく伸ばして新しいものを生み出してもらえるように、これからもサポートしていきたいです。

それはよく聞かれる問いなのですが、制御とAIはあまり相性が良くないと私自身は思っています。制御とAIを人間の体でたとえると、制御は神経系で、AIは脳にあたると言えますが、神経系と脳では、得意とする分野が違います。たとえば、膝をトンと叩くと足が持ち上がる膝蓋腱反射といった神経系の反応の場合、反応速度は50ミリ秒程度になることも珍しくありません。非常に速い。一方、脳によって反応する陸上100m走のスタートは、反応速度が100 ミリ秒未満だとフライングになります。つまり実際の脳の反応速度はもっと遅い。
すなわち、神経系はシンプルなことを非常に速く行うのに対して、脳は複雑なことを時間をかけて行う。制御とAIもそれと同じ関係です。制御は、シンプルな数学でできていて反応が速いから安全性の保証に適している。一方AIは、複雑な状況における安全性を時間をかけて判断するといったことが得意なのです。
言い方を変えると、制御は「この入力の場合、出力はこう」という因果関係が明確です。だからたとえば「正面の障害物との衝突を防止する」と決まっていたら、後ろに追突されるかどうかは考慮せずに即座に止まります。その優先順位は人間が付けることになります。一方AIは、正面の障害物をよけるべきか、後ろとの追突を避けるべきかを、膨大なデータから独自に判断する。そのような違いがあるのです。
それはその社会の価値観などとも関係するので一概には言えませんが、因果関係が明確な方が人は安心するという傾向はあるように思います。実際、自動車の安全性は、制御でしっかり構築するという方向にいまは動いているようです。一方、AIによる高度な予測によって実現される安全性もやはりあるので、その両方を組み合わせることで、より安全なシステムの実現へと近づいていくのではないかと思います。

私はいつも1年生などに「あなたの理想の世界はどんな世界ですか。その中であなたはどういうことに貢献したいと思っていますか」と尋ねています。これはつまり「どんなことであれば、やって失敗しても自分的に満足か」を考えてもらうための問いです。研究なんてうまくいくことはごく稀です。であれば、失敗しても自分の糧になると思えることを明確にして、それをやっていくのがよいのではないかと私は思います。
幸せというのは一瞬のものですが、満足は持続的に成立します。失敗しても心が折れないのは、失敗しても自分が満足なことをやっている場合ではないでしょうか。若い人たちには、そういう何かを見つけて生きていってほしいですね。興味があれば、是非一度オープンキャンパスなどの機会に、研究室を見に来てください。実際見てみると、得られるものもきっと大きく違うはずです。

魚の骨は力に応じて形成されるのか――。坂下美咲嘱託特別講師は、工学理論を応用したシミュレーションと細胞レベルの観察を通して、魚の椎骨がウォルフの法則に基づいて形成される仕組みを解明しています。さらに、その研究を生物進化や古生物の運動様式の理解へとつなげようとしています。

圧電セラミックスは力と電気を変換する材料ですが、多くは鉛を含むため環境負荷が課題です。髙木優香講師は、鉛フリー材料の研究で常識を覆す手法を見出し、新たな解析手法とともに材料開発の可能性を広げています。
平面や球面、ドーナツの表面など、曲面にはさまざまな種類があります。これらの違いや本質的な性質を明らかにし、図形を深く理解する学問が幾何学です。馬場蔵人准教授は、その中でも曲面の性質を解析する「微分幾何学」を研究しています。